Scope and purpose
A devicetree is primarily a hierarchical data structure that describes hardware. The Devicetree specification defines its source and binary representations.
Zephyr uses devicetree to describe:
the hardware available on its Supported Boards
that hardware’s initial configuration
As such, devicetree is both a hardware description language and a configuration language for Zephyr. See Devicetree versus Kconfig for some comparisons between devicetree and Zephyr’s other main configuration language, Kconfig.
There are two types of devicetree input files: devicetree sources and
devicetree bindings. The sources contain the devicetree itself. The bindings
describe its contents, including data types. The build system uses devicetree sources and bindings to produce a generated C
header. The generated header’s contents are abstracted by the devicetree.h
API, which you can use to get information from your devicetree.
Here is a simplified view of the process:
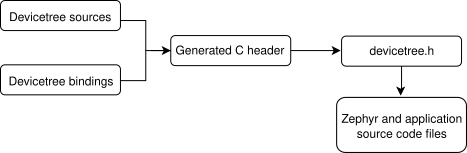
Devicetree build flow
All Zephyr and application source code files can include and use
devicetree.h. This includes device drivers,
applications, tests, the kernel, etc.
The API itself is based on C macros. The macro names all start with DT_. In
general, if you see a macro that starts with DT_ in a Zephyr source file,
it’s probably a devicetree.h macro. The generated C header contains macros
that start with DT_ as well; you might see those in compiler error
messages. You always can tell a generated- from a non-generated macro:
generated macros have some lowercased letters, while the devicetree.h macro
names have all capital letters.